
Dr. Völgyesi Lajos, a Budapesti Műszaki és Gazdaságtudományi Egyetem Általános és Felsőgeodézia Tanszékének egyetemi docense és Dr. Varga József, a Budapesti Műszaki és Gazdaságtudományi Egyetem Általános és Felsőgeodézia Tanszékének egyetemi adjunktusa
Bevezetés
A nagyméretarányú térképek (kataszteri térképek) vetületi rendszerei és ezek alapfelületei, valamint az ezeken ábrázolt háromszögelési hálózatok országonként különböznek, vagy egy országon belül is többfélék lehetnek. Valamely összefüggő háromszögelési hálózat vetülettani értelemben csak akkor tekinthető egységesnek, ha együttesen egyenlítették ki. Kis mértékben akkor is megváltoznak a háromszögelési pontok alapfelületi koordinátái, amikor a hálózatot valamilyen okból, pl. más feltételekkel újból kiegyenlítik.
Zárt matematikai összefüggésekkel csak akkor lehet egy vetületi
rendszerből egy másikba a pontok síkkoordinátáit átszámítani, ha mindkét
vetületi rendszernek ugyanaz az alapfelülete és az ezeken ábrázolt háromszögelési
há-
lózat is egységes, azaz együttesen került kiegyenlítésre. Ha az előbbi feltételek
közül valamelyik nem teljesül, az átszámítás már csak ún. azonos pontok
koordinátáinak felhasználásával végezhető, melyeknek mindkét vetületi rendszerben
ismertek a koordinátái (Hazay, 1964; Varga, 1981, 1982, 1986). Ilyenkor az
átszámítás eredménye az ábrázolt háromszögelési hálózatok
megbízhatóságától és a kiválasztott azonos pontoktól is függ. Ha más azonos
pontokat választunk, az átszámított koordináták is kis mértékben különbözni
fognak. Az átszámítást ilyenkor Helmert-féle síkbeli transzformációval vagy
maximálisan ötödfokú polinomokkal végezhetjük (Vetületi Szabályzat az egységes
országos vetületi rendszer alkalmazására, 1975). Ezekkel a módszerekkel egyetlen
síkbeli transzformációval szándékozunk kiküszöbölni a vetületi torzulásokat és
a háromszögelési hálózatok ellentmondásait is.
Az átszámítást biztonságosabbá és pontosabbá tehetjük, ha az ún. vegyes módszer alkalmazásával két lépésre bontjuk: első lépésben a vetületi torzulásokat, a másodikban pedig a háromszögelési hálózatok torzításait küszöböljük ki. Ilyenkor az első lépésben azzal a közelítéssel élünk, hogy a két vetületi rendszernek azonos az alapfelülete és a háromszögelési hálózata is, és a számítást koordináta-módszerrel elvégezzük (Varga, 1986), így jól közelítő sík-koordinátákat kapunk a második vetületi síkon. Ezt követően a második lépésben Helmert-féle síkbeli transzformációval vagy célszerűbben maximálisan ötödfokú polinomok alkalmazásával folytatjuk a transzformációt. A transzformációs állandók meghatározásához az azonos pontoknak a második vetületi közelítő és a második vetületi adott koordinátáit használjuk fel. Az átszámítás második lépésében már alacsonyabb fokú sorokkal küszöbölhetjük ki a háromszögelési hálózatok különbözősége miatti ellentmondásokat, mintha az egész számítást egy lépésben, általános sorokkal végeznénk.
2. Ausztria és Magyarország közötti átszámítások
Szomszédos országok vetületi rendszerei közötti átszámítások esetén is általában hasonló nehézségek jelentkeznek, olyankor is, amikor az alkalmazott vetületi rendszerek alapfelületei azonosak és a rajtuk ábrázolt háromszögelési hálózatok is összefüggenek. Az általunk vizsgált magyar és osztrák vetületi rendszerek közötti átszámítások sohasem végezhetők koordináta-módszerrel, mert hiába azonos pl. egyes vetületi rendszerek alapfelülete (Bessel-féle ellipszoid) és a háromszögelési hálózatoknak is hiába vannak azonos pontjaik, ha az alapfelületek elhelyezése kismértékben különböző és a háromszögelési hálózatokat is külön-külön egyenlítették ki. Tehát nem marad más lehetőség, mint az azonos pontok felhasználásával végzett átszámítás. Ilyen esetekben mindig a vegyes módszert alkalmaztuk.
Azonos pontok viszont mindig csak az országhatár néhány tíz kilométeres körzetében találhatók, így a szomszédos ország vetületi rendszerei gyakorlatilag csak addig terjeszthetők ki. A GPS az azonos pontok előállításának leghatékonyabb eszköze, mert ha a szomszédos országok háromszögelési pontjainak X, Y, Z térbeli derékszögű, esetleg WGS-84-es vagy UTM-koordinátáit vele meghatározzuk, olyan azonos pontok hálózatát kapjuk meg, amelynek segítségével az országos vetületi rendszerek közötti átszámítások is elvégezhetők.
Ezekre az átszámításokra természetesen csak akkor van szükség, ha valamilyen okból továbbra is valamelyik ország egyik vetületi rendszerében akarunk dolgozni és nem maradunk egyszerűség kedvéért az UTM-vetületben. Egy bizonyos ország valamelyik vetületi rendszerét ilyenkor is csak az ésszerűség határai között terjeszthetjük ki, egy olyan irányban, ahol korábban nem voltak abban a vetületi rendszerben adott pontok. Az Ausztria és Magyarország vetületi rendszerei közötti átszámítások programjainak elkészítését is az tette lehetővé, hogy megfelelő számban rendelkeztünk GPS-szel meghatározott azonos pontokkal. Ezek után már nem kellett azzal törődni, hogy olyan vetületi rendszerek között kell átszámítani, amelyeknek Ausztriában a Bessel, Magyarországon a Bessel, Kraszovszkij vagy az IUGG-1967 ellipszoid az alapfelülete, és Ausztriában a ferroi, Magyarországon a greenwichi meridiánt alkalmazzák kezdő meridiánként.
3. Gyakorlati megoldás
A magyar és az osztrák vetületi rendszerek és alapfelületeik közötti bármely viszonylatban elvégezhető átszámításokra számítógépes programrendszert fejlesztettünk ki. A program jelenlegi 7.20 verziója minimális hardver-követelmények mellett DOS alatt működik, a BME Általános és Felsőgeodézia Tanszékén hozzáférhető. A vetületi átszámításokat végző program a
VTN = vetület nélküli rendszer
BES = magyarországi Bessel ellipszoidi
SZT = budapesti sztereografikus vetületi rendszer
KST = katonai sztereografikus rendszer
HER = hengervetületi északi rendszer
HKR = hengervetületi középső rendszer
ABE = ausztriai Bessel ellipszoidi
AGK = ausztriai Gauss–Krüger vetületi rendszer
IUG = IUGG-67 ellipszoidi
EOV = egységes országos vetületi rendszer
KRA = Kraszovszkij ellipszoidi
GAK = magyarországi Gauss–Krüger vetületi rendszer
WGS = WGS-84 ellipszoidi
XYZ = geocentrikus térbeli derékszögű
UTM = Universal Transverse Mercator
koordináták közötti átszámításokat végzi Magyarország és Ausztria területén az 1. táblázatban szemléltetett 213 kombinációban. A transzformációs lehetőségek között nem szerepel a HDR (hengervetületi déli rendszer) és a BOV (budapesti önálló városi rendszer), mivel e magyarországi rendszerek alkalmazási területe távol esik Ausztria területétől és így gyakorlatilag fel sem merülhet az átszámítás szükségessége.
A táblázat többek között az átszámítások elvégezhetőségével és pontosságával kapcsolatos információkat tartalmazza, melyben kettősvonal határolja el a különböző alapfelületekhez tartozó vetületi rendszereket.
A sorok és az oszlopok metszésében található “ + ” jelek azt mutatják, hogy az adott két vetületi rendszer között zárt matematikai összefüggésekkel elvégezhető szabatos transzformáció lehetséges, így az átszámított koordináták pontossága megegyezik a kiinduló-koordináták pontosságával. A “ Í ” jelek, arra figyelmeztetnek, hogy az adott két vetületi rendszer között zárt matematikai összefüggésekkel elvégezhető transzformáció nem lehetséges, az átszámítás vegyes módszerrel, ennek második lépésében véges fokszámú (legfeljebb ötödfokú) hatványpolinomok felhasználásával történik. Ebben az esetben tehát elvi okok miatt csupán közelítő pontosságú átszámításra van lehetőség (pl. sík-koordináták esetében általában csak cm–dm nagyságrendű az átszámított koordináták pontossága). A táblázatbeli “ - ” jelek, arra utalnak, hogy az azonos vetületi rendszerek közötti (önmagába irányuló) transzformációnak nincs értelme, kivéve a Gauss–Krüger és az UTM vetületi rendszert, ahol gyakran felmerül a szüksége a különböző sávok közötti átszámításnak. Ennek megfelelően a “!+!” jelölés esetén a Gauss–Krüger és az UTM vetületi rendszeren belül a különböző vetületi sávok között szabatos átszámítás lehetséges.
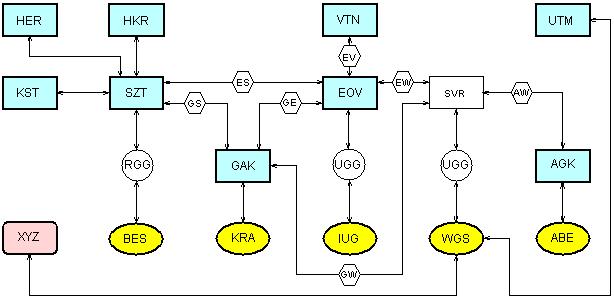 |
1. ábra. |
A magyar és az osztrák vetületi rendszerek és alapfelületeik közötti átszámítások logikáját az 1. ábra szemlélteti. Az egyes vetületi rendszerek közötti transzformációs kapcsolatokat, az átszámítások útvonalát és irányát nyilak jelölik. Az ábrán látható, hogy bizonyos rendszerekből más rendszerekbe általában bonyolult úton, több különböző közbülső lépéseken és rendszereken keresztül juthatunk el. Például a WGS-84 rendszerből az EOV-rendszerbe transzformálás esetén a WGS-84-es ellipszoidi koordinátákat előszöt át kell számítani az új Gauss-gömbre vonatkozó gömbi koordinátákká, majd ezekből segédvetületi sík-koordinátákat kell képezni, amelyekből végül hatványpolinomok felhasználásával tudjuk meghatározni az EOV-sík-koordinátákat. Bármely két rendszer között az 1. ábrán látható hatszögű blokkok azt jelölik, hogy a megfelelő két rendszer között csak korlátozott pontosságú átszámítás lehetséges csatlakozó pontok felhasználásával. A hatszögű blokkokban látható kétbetűs rövidítések a transzformációhoz szükséges hatványpolinomok megfelelő együtthatóit tartalmazó fájlok azonosítására szolgálnak. Az ábrán megfigyelhetjük, hogy ugyanazon alapfelülethez tartozó rendszerek között mindenütt szabatos átszámítással végezzük a transzformációt, ugyanakkor a különböző alapfelületekhez tartozó rendszerek között csak transzformációs polinomok használatával közlekedhetünk.
A fentiekből egyébként következik, hogy a transzformáció nem csupán a magyar és az osztrák vetületi rendszerek közötti átszámításra alkalmas, hanem használható az egyes országokon belül a felsorolt saját rendszerek közötti transzformációra is – így pl. alkalmas Ausztriában a különböző középmeridiánokhoz tartozó Gauss–Krüger-sávok közötti átszámításra.
1. táblázat |
|
4. Pontossági vizsgálatok
Említettük, hogy bizonyos vetületi rendszerek között zárt matematikai összefüggésekkel elvégezhető transzformáció lehetséges. Kísérleti számításaink során megállapíthattuk, hogy ezekben az esetekben az elvárásoknak megfelelően a transzformált sík-koordináták pontossága megegyezik a kiinduló-koordináták pontosságával, azaz a sík-koordináták esetén biztonságosan tartható a mm-pontosság, a földrajzi koordináták esetében pedig a 0,0001” pontosság. Ezekre a kapcsolatokra az 1. táblázatban a “+”, illetve a “!+!” jellel utaltunk, illetve ezeket a rendszereket az 1. ábrán közvetlen folyamatos vonal (nyíl) köti össze.
Az összes többi esetben, amikor két tetszőleges vetületi rendszer között az átszámítás 1. ábrán látható útvonala a hatszögekkel jelölt blokkon (vagy blokkokon) keresztül vezet, az átszámított koordináták pontossága egyrészt attól függ, hogy a kérdéses vetületi rendszerek alaphálózatai mennyire pontosan illeszkednek egymáshoz, másrészt, hogy az adott transzformációs polinomok együtthatóit mennyire sikerült jól meghatározni. Ebből egyébként az következik, hogy bizonyos vetületi rendszerek között akárhogyan is határozzuk meg a transzformációs polinomok együtthatóit, ha a két rendszer háromszögelési hálózatai a meghatározásuk idején elkövetett mérési, kiegyenlítési vagy egyéb hibák következtében nem illeszkednek pontosan egymáshoz, akkor a két vetületi rendszer között biztosan nem végezhető korlátlan pontosságú átszámítás (másképpen fogalmazva, valamely két vetületi rendszer között legfeljebb olyan pontosságú átszámítás lehetséges, amilyen pontosságot a két rendszer között az alaphálózatok meghatározási hibái, illetve eltérései megengednek). Mindez természetesen nem azt jelenti, hogy nem kell különös gondot fordítani a transzformációs módszer kiválasztására, illetve a vegyes módszer második lépésében hatványpolinomos eljárás alkalmazása esetén a polinom-együtthatók meghatározására.
Vizsgálataink során megállapítottuk, hogy a gyakorlatban leginkább elterjedt két megoldási módszer: a Helmert-féle síktranszformáció, illetve a hatványsoros módszer közül a hatványsoros megoldási módszer szolgáltat nagyobb pontosságot, ezért egyértelműen a hatványsoros megoldási eljárás használata mellett foglaltunk állást.
A hatványsoros transzformáció esetén fontos kérdés a hatványpolinom optimális fokszámának megállapítása. Vizsgálataink során, arra a megállapításra jutottunk, hogy a hatványpolinom fokszámának növelésével nem növelhető tetszőlegesen a vetületi átszámítások pontossága – a legnagyobb pontosság az ötödfokú polinom alkalmazásával érhető el adott terület esetén. Akár csökkentjük, akár tovább növeljük a fokszámot, az átszámított koordináták pontossága egyértelműen romlik (a fokszám növelésével extrapoláció esetén a terület szélein romlik elsősorban a pontosság).
A hatványpolinomos módszerrel elvégzett vetületi átszámítások pontosságának jellemzésére a közös pontok I rendszerbeli; valamint a II rendszerbeli koordinátái alapján először meghatároztuk a transzformációs polinomok együtthatóit, majd ezek felhasználásával átszámítottuk az I rendszerbeli koordinátákat a II rendszerbeli koordinátákká és kiszámoltuk ezek alapján az átszámítás pontosságát jellemző középhiba értéket.
Tájékoztatásként megemlítjük, hogy például az EOV és a WGS-84 között 34 csatlakozópont felhasználásával az (1) összefüggéssel számítható középhiba µ = ± 0,037 m, az EOV és a magyarországi Gauss–Krüger között 50 csatlakozópont felhasználásával µ = ± 0.217 m, a WGS-84 és az osztrák Gauss–Krüger rendszer között pedig 57 csatlakozópont felhasználásával µ = ± 0,152 m.
*
A szerzők ezúton köszönik meg a T-030177 sz. OTKA, valamint az MTA Fizikai Geodézia és Geodinamika Kutatócsoport által a fenti vizsgálatok elvégzéséhez nyújtott támogatást.
Irodalom
1. Hazay I. (1964): Vetülettan. Tankönyvkiadó, Budapest
2. Vetületi Szabályzat az egységes országos vetületi rendszer alkalmazására (1975). MÉM OFTH, Budapest
3. Varga J. (1981): Vetületi rendszereink közötti átszámítások új módjai. Műszaki Doktori Értekezés, Budapest
4. Varga J. (1982): Átszámítás az egységes országos vetületi rendszer (EOV) és a korábbi vetületi rendszereink között. Geodézia és Kartográfia No2.
5. Varga J. (1986): Alaphálózatok I. (Vetülettan) Tankönyvkiadó, Budapest (in Hungarian)
6. Völgyesi L.–Gy. Tóth–J. Varga (1994): Magyarországi vetületi rendszerek közötti átszámítások. Geodézia és Kartográfia Vol. 46, No. 5–6.
7. Völgyesi L.–Gy. Tóth–J. Varga (1996): Conversion between Hungarian map projection systems. Periodica Polytechnica Civil Eng. Vol. 40, No. 1, pp. 73–83.
8. Völgyesi L. (1997): Transformation of Hungarian Unified National and Gauss–Krüger Projection System into WGS-84. Reports on Geodesy, Warsaw University of Technolgy, No. 4 (27), pp. 281–294.
Conversion between Hungarian and Austrian map projection system using GPS
L. Völgyesi–J. Varga
Summary
Conversion between Hungarian and Austrian map projection systems is presented in this paper. The conversion may be performed in two steps: first any kind of map projection systems should be transformed into WGS-84 ellipsoidal co-ordinates in one country, and then from WGS-84 ellipsoidal co-ordinates should be transformed into the desired system for the other country. An algorithm and a computer program has been developed to carry out his transformation.
