Dr. Busics György,
a Nyugat-Magyarországi Egyetem Földmérési és Földrendezői Főiskolai Kar főiskolai docense
GPS-felmérési hálózatok tervezési és minősítési szempontjai
Dr. Busics György,
a Nyugat-Magyarországi Egyetem Földmérési és Földrendezői Főiskolai Kar főiskolai
docense
Bevezetés
Felmérési hálózat alatt az országos vízszintes hálózaton belül, összefüggő területen, valamilyen részletes felmérési vagy kitűzési cél érdekében kialakított alsórendű alappontok halmazát értjük. Ma alapvetően két technológiát alkalmazunk ilyen célra: az irány- és távméréses alappontsűrítést mérőállomással, illetve a műholdas helymeghatározást, a GPS-t. Elsősorban gazdaságossági szempontok alapján döntünk arról, hogy a két technológia közül, melyiket válasszuk, illetve vegyes alkalmazás esetén, milyen legyen köztük az arány. Ha megnézzük az utóbbi évek NKP-s munkáit, azt látjuk, hogy ezek szinte mindegyikében elsődleges szerepe volt a GPS-nek. A GPS javára elsősorban az szól, hogy kisebb költséggel, kevesebb helyszíni munkával és gyorsabban lehet az alappontsűrítést elvégezni, mint földi eljárással, ezáltal a sokszor szűkre szabott határidők betartása is lehetővé válik. A tömeges pontsűrítés miatt érdemes összefoglalni az eddigi tapasztalatokat, annál is inkább, mert az új alappontsűrítési szabályzat szerkesztése most van napirenden.
A tervezés szempontjai
Csatlakozás az OGPSH-hoz. Miután teljesen elkészült az Országos GPS-Hálózat, indokolatlan és gazdaságtalan lenne a felmérő részéről, ha önálló GPS-hálózatra építve oldaná meg feladatát. A jövő érdekét is az szolgálja, ha tovább építjük a 3D hálózatot. Az a feltétel is logikusnak tűnik, hogy a legközelebbi OGPSH-pontokra támaszkodva kell a pontsűrítést elvégezni.
Az ismert pontok száma. Itt a GPS-hálózat kialakításában résztvevő adott pontokról van szó: véleményünk szerint legalább két adott pontnak kell lennie nagytömegű pontsűrítésnél. Más kérdés, hogy az EUREF-ben ismert 3D-pontokról vagy az EOVA/EOMA-ban ismert 2D+1D pontokról van-e szó. A feladat megoldható így is, úgy is. Véleményünk szerint legalább egy OGPSH-pontja legyen a hálózatnak, de inkább három–négy, a munkaterülethez legközelebbi OGPSH-ponthoz csatlakozzunk a méréssel. Kívánatos, hogy a munkaterületen elhelyezkedő országos vízszintes alappontokat is bevonjuk a GPS-mérésbe, akár adott pontként, akár transzformációs közös pontként. Ellenkező esetben ugyanis ezek a pontok csak ellenőrzésre szolgálnak, és nem segítik a GPS és a klasszikus hálózat közötti legjobb összhang megteremtését.
A rendűség kérdése. Itt, az a kérdés valójában, hogy fenn kell-e tartani a megszokott ötödrendű alappont-felmérési alappont megkülönböztetést az alsórendű alappontoknál, vagy nem. Véleményünk szerint a negyedrendű pontok után elegendő egyetlen szintet létrehozni, a “felmérési alappontokét”, mert GPS-sel (de földi eljárással is) az országos hálózaton belül homogén pontossággal létesíthetők további alappontok. Lényeges lenne azonban a belterületi–külterületi elhelyezkedés szerinti, ezidáig létező pontossági elkülönítés megszüntetése.
A felmérési hálózat létrehozásának ütemezése. Itt arról van szó, hogy a vektormérés viszonyító pontjai, az ún. referenciapontok, mindig az adott pontok legyenek-e (1. ábra),
|
1. ábra. OGPSH-pontokra támaszkodva egy ütemben létrehozott felmérési alappontok. |
avagy első ütemben hozzuk létre a referenciapontot (vagy ponthálózatot), majd a második ütemben, az álló vevőt ezekre a pontokra telepítve, a felmérési alappontokat (2. ábra).
|
2. ábra. Két ütemben létrehozott felmérési alappontok: a)
referenciapontok hálózata, |
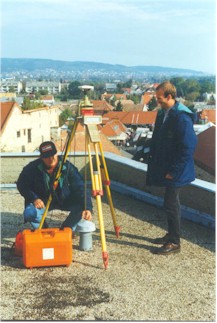
Nevezhetjük az első ütemben létrehozott hálózatot referenciahálózatnak, vagy kerethálózatnak. Az ütemezés nem szabályozandó kérdés. Ugyanis mindkét megoldás elfogadható és eredményes lehet. A két ütemben történő megvalósításnak az ad értelmet, hogy az 5 km-nél rövidebb vektorokat rövidebb ideig kell mérni, mint az 5–15 km átlagos hosszúságú vektorokat, így összességében rövidebb idő alatt oldható meg a feladat, mintha sok “hosszú” vektort mérnénk. Előnye a két ütemben történő mérésnek, hogy így a referenciapontok helyét ideálisan választhatjuk meg. Ahol nincs kitakarás, ahol biztosított a folyamatos áramellátás, ahol nem kell felügyelet (3. ábra).
|
3. ábra. Referenciapont a keszthelyi színház tetején. |
A térbeli számítás történhet az összes mért vektor együttes kiegyenlítésével, vagy a mérés szerinti két ütemre bontva a hálózatot, vagy akár a naponként mért hálózatrészek különálló számításával – ez sem szabályozandó kérdés. Bármelyiket is választjuk, fontos, hogy a kiegyenlítés előtt gondoskodjunk a durva hibák kiszűréséről.
Az állandósításról. Az új pontokat rendszerint állandósítani kell, de nem minden új pontot alkalmas vagy célszerű állandósítani (láttuk, hogy éppen a referenciapontok lehetnek ilyenek). A klasszikus szóhasználattal “vesztett pont”-nak nevezett pontok számát vagy arányát azonban elő kell írni.
Észlelési lehetőség |
Megközelíthetőség |
||
1 |
Kiváló, nincs látási akadály az égboltra. |
1 |
Műút mellett, a gépkocsi tíz méteren belül parkolhat. |
2 |
Gyakorlatilag jó kilátás az égboltra, kisebb látási akadályok. 20%-os takarás. |
2 |
Műúthoz közel, gépkocsi néhány tíz méterre parkolhat, kis sétával elérhető. |
3 |
Közepes kilátási viszonyok (egyik oldalon fasor, vagy épület). 30%-os takarás. |
3 |
Műúttól távol, hosszabb földúton érhető el, csak száraz időben ajánlott. |
4 |
Erősen takart égbolt, kitakarási ábra figyelembevétele javasolt. 40%-os takarás. |
4 |
Műúttól távol, terepjáróval, vagy 500 m-nél kevesebb gyaloglással érhető el. |
5 |
GPS-mérésre nem alkalmas. |
5 |
500 m-nél több gyaloglással érhető el. |
Kitűzési szempontok. A felmérés, azt kívánja meg, hogy a (poláris) részletméréshez a legkedvezőbb feltételeket biztosítsuk. Legyenek tájékozó irányok, nagy terület legyen belátható, a pont fennmaradása biztosított legyen. Ugyanakkor a GPS-mérés szempontjából a kitakarásmentes égbolt és a jó megközelíthetőség a legfőbb szempont. Amely pontnál az ideális GPS-mérési feltételek sérülnek, ott hosszabb időtartamú mérést kell tervezni.
Pontleírás, a pont minősítése GPS-szempontból. A későbbi GPS-mérések tervezéséhez az lenne kívánatos, hogy a felkeresett pontokat a GPS-mérésre való alkalmasság szempontjából minősítsük. Az egyik ilyen jellemző a kitakarás, amit egyszerű megoldásként például öt kategóriába sorolhatnánk, becslés alapján (I. táblázat). A másik jellemző a pont könnyű vagy nehéz megközelíthetősége, amit szintén lehetne kódolni. Fontosnak tartanánk, hogy minden országos alappont időszakos helyszínelésekor is készüljön ilyen adatlap, ami a kifedés változására is kiterjedne.
Vízszintes vagy térbeli alappontok? A GPS-t – bár térbeli pontmeghatározási módszer –, elsősorban a vízszintes koordináták meghatározására használjuk, ahol mintegy “mellékesen” megkapjuk a pontok magasságát is. A magasságok pontossága azonban a mérési–számítási technológiától függően változó. Ha a felmérési cél (pl. közműfelmérés, útkitűzés, vízügyi tervezés) cm pontosságú magassági igényt jelent, akkor ezt már a tervezésnél figyelembe kell venni, azzal, hogy megfelelő számú és minőségű magassági illesztőpontot vonunk be.
Az észlelés szempontjai
Észlelési módszerek. Ma elsősorban statikus módszerrel határozunk meg alappontokat, de nem zárható ki a kinematikus (stop and go) vagy a valósidejű (RTK) módszerek alkalmazása sem. Kinematikus módszereknél azonban feltétlenül külső ellenőrzést kell megkívánni. A statikus módszernél lehet ajánlást tenni a minimális mérési időre, de elsősorban a felmérő saját érdeke, hogy azt jól állapítsa meg. Mivel a bázishossz, az észlelt holdak száma, a DOP-érték, a takaró objektumok, a vevő és szoftver típusa és fejlettsége, mind-mind hatással vannak a szükséges mérési időtartamra, nem érdemes ezt szabályozás tárgyává tenni, hanem inkább az eredményt minősíteni.
Mérési elrendezés, szervezés. A mérési elrendezés alapvetően sugaras, poláris (4. ábra), vagy hálózatszerű lehet, de ezek kombinációja is elképzelhető. A gyakorlatban az alakult ki, hogy először hálózatszerű méréssel létrehozzuk a referenciapontok rendszerét, majd ezután a referenciapontokról sugarasan létesítünk új pontokat. Az ellenőrzés érdekében ezt is többféle módon tehetjük meg, ha háromnál több vevő áll rendelkezésre.
|
4. ábra. Poláris mérési elrendezés két vevővel. |
1. Egyidejűleg két referenciavevő üzemel, miközben a többi vevő egymástól függetlenül, nem összehangoltan mér az új pontokon. A gyors statikus mérés és a pontok közelsége miatt számos kiértékelhető vektor akad az új pontok között is, amit egyébként nem terveztünk (5. ábra).
|
5. ábra. Hálózatszerű elrendezés, aszinkron mérések négy vevővel, két referenciaponttal. |
2. Ha a mozgó vevők között telefonos kapcsolat biztosítható, akkor összehangolt, szinkron-mérési periódusokat is szervezhetünk. Ilyenkor az együtt mérő összes vevő között, minden vektor kiértékelhető, s kettő helyett elegendő egy referenciavevőt üzemeltetni (6. ábra).
|
6. ábra. Hálózatszerű elrendezés, szinkron mérések négy vevővel, egy referenciaponttal. |
3. Egyes erősen takart pontoknál a visszatéréses (reoccupation) módszert is eredményesen lehet alkalmazni, ha könnyen felkereshetők a pontok.
Mérési jegyzőkönyv. Az eredeti mérési eredmények megőrzésének kötelezettségét vevőtől független, ún. RINEX formátumban érdemes előírni. Ennek indoka az, hogy kritikus esetben csak az újrafeldolgozás segít a probléma feltárásában, továbbá, bármilyen jövőbeni, más szempontú feldolgozásra is az eredeti mérésből célszerű kiindulni. A méréskor mindössze a pontszámot és az antennamagasságot kell manuálisan bevinni. Ha van ellenőrző egység, akkor ezeket az adatokat nagy gondossággal a terepen célszerű beírni; az ún. dobozvevőknél erre rendszerint az utófeldolgozáskor kerül sor. A kompakt vevők esetében, az azonosítás céljából, a felmérő érdeke, hogy a terepen manuális jegyzőkönyvet vezessen. Igen fontos, hogy a helyes pontszámot írjuk be. Ebből a célból érdemes világos rendszerben előre számozni az új pontokat, megállapodni az adott pontok egyértelmű pontszám-azonosítójában. A téves pontszámozás nagyban lerontja az automatikus feldolgozás hatékonyságát, a hibakeresés sok időt vesz el. Ugyancsak fontos ügyelni az antennamagasságnak és az ehhez tartozó különböző magassági külpontosságnak (offset) a helyes értelmezésére és megmérésére. További fontos elem, hogy a mérés esetleges zavaró, azt hátráltató körülményeit (kevés hold, gyakori jelvesztés, akadály, vezeték) feljegyezzük magunknak.
Célszerű előírni, hogy az OGPSH-pontokon az eredeti anyaponton történjen minden GPS-mérés, elkerülendő a fejelőkő vízszintes vagy magassági külpontos elhelyezéséből eredő hibákat. Tehát – ellentétben a mai szabályozással – nem tiltani kellene a fejelőkő eltávolítását a mérés idejére, hanem éppenséggel kötelezővé tenni (7. ábra).
|
7. ábra. Referenciavevő Kőszegen, mellette az eltávolított fejelőkő. |
A feldolgozás szempontjai
A vektorfeldolgozás
A GPS-mérések feldolgozásának első szakaszában a nyers mérési
eredményekből a D X, D Y, D Z vektorösszetevőket számítjuk ki két-
két pont között. Az előkészítéskor, arra kell ügyelnünk, hogy ellenőrzött
(javított) pont-
számokkal és antennamagasságokkal induljunk, és a pontoknak “10 m-re jó” WGS84-beli abszolút X, Y, Z koordinátái legyenek. Érdemes az összes kiértékelhető vektort számítani (bár tudjuk, hogy az azonos periódusban mért vektorok nem teljesen függetlenek egymástól), mert ez is ad ellenőrzési lehetőséget. Milyen paraméterek garantálhatják egy-egy vektor “jóságát”?
1. Mindenekelőtt a fázis-többértelműség egész számként történő meghatározása (fix solution, ambiguity yes). Mivel a felmérési hálózatoknál rendesen tíz km-nél rövidebb vektorokat mérünk, ez feltétele kell legyen a vektor elfogadhatóságának. Ha nem teljesülne ez a feltétel, akkor még próbálkozhatunk a vektor “megmentésével”. A fix megoldást a feldolgozó programok statisztikai próbákhoz kötik, ahol a nullhipotézis például az, hogy a kapott megoldás középhibája kisebb egy apriori értéknél, vagy a fix megoldás és a float megoldás aránya jó.
2. A másik paraméter, ami vizsgálható, az a vektor-összetevők középhibája (varianciája). Tudnunk kell, hogy ez a mérési eredmények (kettős különbségek) szórásából számítható, ún. belső középhiba, ami a külső körülmények (pl. ionoszféra) jelentős hatása miatt nem a valódi helyzetet tükrözi. Különösen a túl rövid mérési idő esetén vezethet téves következtetésre, ha csak a középhibát vizsgáljuk. A variancia akkor is nagyértékű lesz, ha zajosak voltak a mérési körülmények, pl. rezgett az antennatartó rúd (erős szélben vagy antennakiemelő szerkezet alkalmazásakor).
3. Harmadik vizsgálható paraméternek tekinthető még a legvalószínűbb és a második “legjobb” megoldás középhibái közötti arányszám (“ratio”). Ajánlatos, hogy ez az arányszám viszonylag “nagy” legyen, de a konkrét érték a szoftvertől is függ.
Térbeli (EUREF-) koordináták számítása
A legegyszerűbb esetben az elfogadott vektorösszetevőket hozzáadjuk a referenciapont ismert koordinátáihoz. Ha – mint rendesen – a referenciapont OGPSH-pont, vagy térbeli kiegyenlítéssel az OGPSH-n belül meghatározott pont, akkor is fontos, hogy összeolvasással meggyőződjünk a referenciapont adott koordinátáinak helyes beviteléről. Ha a kiindulópont nem OGPSH-pont (hanem EOVA-ból transzformált koordinátákkal rendelkezik), akkor indokolt a külső ellenőrzés, vagyis két adott pont használata.
Ha két vagy több adott pontról mértünk új pontot, akkor az eljárás a következő lehet.
1. Legegyszerűbben a hagyományos pontonkénti számításnak megfelelően járhatunk el: közepeljük az egymásnak megfelelő, kapott koordinátákat. A hibahatárt a kerethiba és a becsült mérési hiba szabja meg.
2. Elképzelhető, hogy a legjobb varianciájú mérésből számítjuk a végleges koordinátákat, a többit csak ellenőrzésre használjuk fel. Ilyenkor azonban a kerethibák egyenletes eloszlásának elvét nem vettük figyelembe.
3. Egyértelműbb és korrektebb megoldás az, ha térbeli hálózat-kiegyenlítéssel számítjuk az új pontok koordinátáit, akkor is, ha több adott pont van, de akkor is, ha csak egy referencia van, viszont hálózatszerű volt a mérés lebonyolítása. A kiegyenlítés feltétele a durva hibák előzetes kiszűrése. Ebben a többször mért vektorok összehasonlítása, a vektor-sokszög záróhibáknak a számítása, a többször mért, vagy a több adott pontról mért új pontok előzetes koordinátáinak egybevetése segíthet.
A térbeli kiegyenlítés előnye nemcsak az egyértelműség és egyes szoftvereknél a durva hibás vektorok kiszűrése, hanem a pontossági
mérőszámok közlése is. Ilyenek a vektorösszetevők középhibái, az új pontok hibaellipszoid-adatai. A vektorok javításainak nagysága, vagy a javítások eloszlásának hisztogramja is jó tájékoztatást ad a pontok megbízhatóságáról. A javításokra hibahatárokat lehetne megadni. Természetesen a térbeli hálózatnál is alapkövetelmény, hogy megfelelő számú fölös mérés (vektor) legyen a hálózatban. A teljes térbeli hálózat egyetlen pontossági mérőszámmal is jellemezhető. Például az új pontok átlagos középhibájával, a mért vektorok átlagos középhibájával, a hálózat relatív hibájával.
A GPS–EOV transzformáció
A GPS-sel mért EOV-koordináták számítására leggyakrabban a hétparaméteres térbeli hasonlósági transzformációt használjuk, bár más típusú transzformációk is hatékonyak lehetnek. Feltétlenül a munkaterülethez legközelebbi 4–5–6 OGPSH-pontra, mint transzformációs közös pontra kell támaszkodnunk. Az is fontos lenne, ha már egyszer meghatároztuk a transzformációs paramétereket, akkor a következőkben mindig ugyanazokat használjuk. Véleményünk szerint, nagytömegű pontsűrítésnél indokolt, hogy a munkaterületen található és GPS-mérésre alkalmas országos vízszintes alappontokat ne csak a GPS-mérésbe, hanem a GPS–EOV-transzformációba is bevonjuk. Ezzel lenne elérhető az adott területen a legjobb összhang a két vonatkozási rendszer között. Ez lényeges, hiszen térképrendszerünk alapja továbbra is az EOVA.
A közös pontoknál még megengedhető maradék ellentmondás nagysága külön vizsgálatot igényel. Ez országrészenként, területnagyságonként különböző lehet, de nyilvánvaló, hogy ilyen hibahatárra szükség van. Az EOVA kerethibái és a relatív GPS-mérés sajátosságai indokolják, hogy sem a mérésnél, sem a transzformálásnál ne lépjük túl a 15–20 km-es körzethatárt, ellenkező esetben ugyanis már bonyolultabb feldolgozási stratégiát kell követni.
Munkarészek
Ismételten szeretnénk megvilágítani az eredeti mérési eredmények megőrzésének jelentőségét, noha ez a konkrét felmérési cél szempontjából érdektelen. Szükség lehet ugyanis a későbbiekben a más szempontú feldolgozásra vagy transzformációra (pl. magassági felméréshez, közműfelméréshez), vagy a felmérési hálózatnak egy nagyobb munkaterületbe való beillesztésére. Ezzel mintegy továbbépítenénk a 3D geodézia alapját jelentő GPS-hálózatot.
A GPS-munkarészek többségére elektronikus formában van szükség, ugyanakkor a végeredményt és az elfogadási kritériummal szabályozott adatokat, nyomtatott formában is meg kellene kívánni. A javasolt munkarészek:
1. Mérési jegyzőkönyv (RINEX formátumban)
2. Pont-adatlap (helyszínrajz kiegészítése a GPS-mérésre való alkalmasság minősítési számával)
3. Vektorok adatai (vektorösszetevők és kovarianciamátrix, fázis-többértelműség, ratio, vektorsokszögek záróhibái…)
4. Térbeli hálózat számítása (vektorjavítások, pontközéphibák, hibaellipszoid-paraméterek, vázlatok)
5. EUREF–koordináta-jegyzék
6. EOV–koordináta-jegyzék
7. Transzformációs munkarészek (közös pontok koordinátái, a transzformáció jellege és paraméterei, a maradék ellentmondások topocentrikus rendszerben, vázlat)
8. Ellenőrzési jegyzőkönyv
Befejezés
Az eddigiekben láttuk, hogy a fölös számú adatok minden feldolgozási fázisban lehetőséget adnak az eredmények ellenőrzésére, minősítésére. A legbiztosabb módja az ellenőrzésnek mégis az, ha külső úton, a GPS-től független módon győződünk meg az eredmény pontosságáról. Ilyen külső ellenőrzés lehet az új pontokon végzett tájékozás, az új pontok közötti távolság vagy magasságkülönbség földi úton történő megmérése, a pontok egy részének földi módszerrel való meghatározása. Jól használható gyakorlati elv: ami nem kiegyenlíthető, azon a ponton megismételjük a mérést, vagy külső ellenőrzésre törekszünk.
Ma Magyarországon rutinszerűen létesítenek felmérési alappontokat GPS-technikával. A tervezés–mérés–feldolgozás munkafázisára vonatkozóan számos tapasztalat gyűlt össze, amit talán érdemes figyelembe venni.
Irodalom
Borza T.–Busics I.: Szempontok a GPS-sel végzett geodéziai munkák vizsgálatára. Kézirat a FÖMI KGO ajánláshoz. 1994.
Borza T.: Elkészült az országos GPS-hálózat = Geod. és Kart., 1998/1.
Csizmarik I.–Szabady Zs.: Nagytömegű alappontsűrítés GPS-sel Tatabánya újfelmérése során. A 12. Kozm. Geod. Szeminárium előadásainak gyűjteménye. Székesfehérvár, 1999., 69–74. o.
Csepregi Sz.: GPS-hálózatok kiegyenlítése. A 12. Kozm. Geod. Szeminárium előadásainak gyűjteménye. Székesfehérvár, 1999., 155–161. o.
Zimmer, Rj.: Creating a County Mapping Control Network: A Work in Progress. Surveying and Land Information Systems, Vol. 59, No. 3, 1999., pp. 159–163.
Planning and Qualifying the GPS Survey Control Networks
Gy. Busics
Summary
In last years the GPS technique became routinely used method for national horizontal network densification in Hungary. There are many experiences connecting to reconnaissance – measurement – postprocessing of GPS survey networks that are created inside the 10×10 km National GPS Network. Some points of view depend only from surveyor users but some expectations need to be ruled by professional directions. For example the quality of GPS vectors, the rms of 3D network adjustment, the residuals of transformation.