Dr. Joó István egyetemi tanár, Nyugat-Magyarországi Egyetem, FFFK, Székesfehérvár
Dr. Joó István egyetemi tanár, Nyugat-Magyarországi Egyetem, FFFK,
Székesfehérvár
A ma már több évtizedes műho
ldgeodézia gyakorlata szinte forradalmi hatással volt (és van ma is) a geodéziára. Hiszen ennek eredményeképpen egyrészt alapvetően megváltozott a helymeghatározás gyakorlata (gyorsabb és egyúttal olcsóbb is lett). Ezen belül az elmúlt néhány évtizedes történet legutóbbi állomása a GPS, amely már együttesen alkalmazza a korábbi eljárások (SLR, pályamódszerek, stb.) kiérlelt eredményeit. Ez a magyarázata a GPS gyors – és egyre bővülő – elterjedésének. Hiszen a GPS-technika mindkét műholdas rendszerét (NAVSTAR/USA; GLONASS/Orosz Föderáció) egyformán lehet alkalmazni a gyakorlati munkákhoz, illetőleg szélső pontosság-igényű programokhoz. Így kézenfekvő, hogy a végeredmény megbízhatósága különbözőségének oka jelentős mértékben a mérés technológiájában és ezen belül az alkalmazott javítások igényességében (esetleg egyes hatások elhanyagolásában) keresendő.A GPS gyakorlati felhasználásánál egyes lehetséges hibahatásokkal nem foglalkoznak, ille
tőleg olyan feldolgozási programokat használnak, amelyek a főbb hibaforrások általános (standard) figyelembevételét is magukban foglalják. Ezt a gyakorlatot segítik az ún. differenciális eljárások is (egy-, kettő-, illetőleg háromszoros differenciális eljárások), amelyek révén számos hibahatás nagy része kiejthető.A szélsőpontosság-igényű programok eset
ében természetesen már más a helyzet. Ekkor minden lehetséges hibaforrást fel kell tárni, és gondoskodni kell azok kiejtéséről, vagy pedig a hatások szigorú figyelembevételéről. Ebben az értelemben különösen a környezet-, illetőleg időfüggő specifikus hatások (légnyomás, hőfok, páratartalom, elektrontartalom) okozzák a legtöbb gondot.A mostani tárgyalás során, hosszabb vektorok esetén, a földi légkör okozta (troposzféra, ionoszféra) hibahatásokkal kívánunk foglalkozni. Ezek alapos megismerése (és modellezé
se) nélkül nem lehet szó szélső pontosságú GPS meghatározásokról sem hálózati, sem pedig geodinamikai célból.A továbbiakban előbb áttekintjük a GPS-méréseket befolyásoló tényezőket, majd pedig k
ifejezetten az ionoszféra és a troposzféra hatásával foglalkozunk. Ezeknél is elsősorban azokat az elemeket mutatjuk be, amelyek hazai tárgyalására még nem, illetőleg csak részben került sor.A tulajdonképpeni téma bemutatásánál – a külföldi források mellett – nagy segítséget jelente
nek azok a hazai tanulmányok, amelyek a troposzférikus, illetőleg ionoszférikus hatásokkal (különösen azok fizikai és matematikai alapjaival) már foglalkoztak; Bányai–Papp–Tóth (1994), Bencze P. (1994) és Nagy S. (1994). Ezért az ott leírtakkal mi már nem foglalkozunk.1. GPS-méréseket befolyásoló tényezők áttekintése
A hibahatásokat a következő csoportokba szokták sorolni:
Az űrszegmens hibái:
pálya-, és órahibák, az antenna fáziscentrum hibája, a jeltovábbítás hibái, stb.Úthibák: az ionoszféra-, és troposzféra hatása, többutas terjedés, az ún. imaging, fáziscsúszások.
A felhasználói szegmens hibái: különösen az órahibák, az antenna fáziscentrum hibája, a ve
vőantenna kialakítása, az ún. csatornaközi buborék hatása, stb.A pályahibát ma ±(3,5–20) cm-re teszik (
ERS-1), a holdon lévő atomóra stabilitását a 10–13 s/nap jellemzi, a hold műszeres zaját pedig ±(2–50) cm-re becsülik.A többutas terjedés hatása (a gondos helyki
választással) mérsékelhető, de a bennmaradó rész még mindig jelentős lehet. Értéke elvileg nem lehet nagyobb, mint az alkalmazott frekvencia hullámhossza. Ez fázismérésnél a vivőhullám-, kódmérésnél pedig a kódfrekvencia hullámhosszát jelenti. Ugyanakkor Dana (1995, illetőleg Hirter (1998), a mérési mód megjelölése nélkül erre max. 05, m-t, illetőleg(0,1–0,0) m-t,
(0,1–10,0) m-t
ad meg.
A vevő műszer késleltetése, a kód fajtájától függően elérheti az 1 m-t is, az antenna fázi
sközpont hibája pedig (mm–cm) körüli.2. A Föld légkörének hatása
A légkört a GPS-mérések szempontjából troposzférára és ionoszférára osztják (1. ábra).
Az előbbi a légkör alsó néhány-tízkilométeres részét jelenti, az ionoszféra pedig mintegy 1000 km-ig terjed. De megemlíthető még a plazmaszféra, amely az ionoszféra felett talá
lható, és több tízezer km vastagságú, s ebben a magasságban keringenek a GPS-holdak is (20 200 km/NAVSTAR, 19 100/GLONASS).2.1. Az ionoszféra késleltető hatása
Az ionoszférát az elektronsűrűség függv
ényében D, E, F1, F2 rétegekre szokás felosztani. Az 1. ábrán megadott sűrűségadatok alapján láthatjuk, hogy az elektronsűrűség függ a napszaktól (és így a földrajzi helyzettől), továbbá a magasságtól. De az ionoszféra állapotát befolyásolja még a napfoltok száma, sőt még a napfogyatkozás is (lásd AVN, 11–12/1999; N. Jakowski és társai).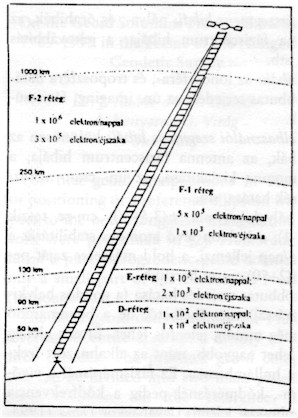 |
1. ábra. Az ionoszféra rétegei |
 |
1. ábra. Az ionoszféra rétegei |
Fázismérés esetén az ionoszférán áthaladó rá
dióhullámok sebessége (csoportsebesség) az elektronsűrűségtől függően kisebb lesz, mint az elméleti érték. Ezért beszélhetünk ionoszférikus késleltetésről.
 |
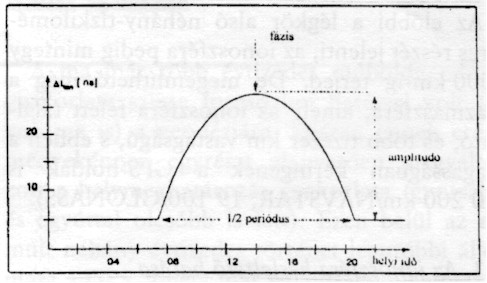
2. ábra. Az ionoszférikus késleltetés modellje (Klobuchar) |
Szólni kell még az F2 réteg feletti tartományról is (topside), amely 50%-ban, a plazmaszféra pe
dig mintegy 10%-ban felelős a késleltetésért (Bányai, Bencze).A késleltetés napi alakulását a 2. ábrán bemu
tatott egyszerűsített Klobuchar-modell mutatja, ahol az abszcissza-tengelyen a helyi időre vonatkozó óraértékek, az ordináta-tengelyen pedig a késleltetés mértéke (D t) található 10–9-s egységben.Az ábra szerint a max. késleltetés 14 óra körül jelentkezik, éjszaka pedig a késleltetés minimális és kb. egyenletes. A késleltetés hossz-egységben kifejezett max. értéke 7,5–8 m, a minimális pedig mintegy 1,5 m.
Figyelemmel arra, hogy a rádióhullámok terjedési sebessége függ azok frekvenciájától is, ezért a cégek egyrészt magasabb frekvenciát alkal
maznak (persze a frekvencia növelésének korlátai is vannak), másrészt egyidejűleg két frekvencián végzik a méréseket (“kétfrekvenciás mérések”). Ilyen módon a késleltetés kiejthető. Ez azonban csak részben igaz; jórészt a módszernél alkalmazott elhanyagolások miatt, másrészt az alkalmazott modellek korlátai miatt. (Ennek részletesebb kifejtése most hely hiányában nem lehetséges.)2.2. A troposzférikus késleltetés
 |
3. ábra. Jelterjedés a légkörben (Fermat-elv) |
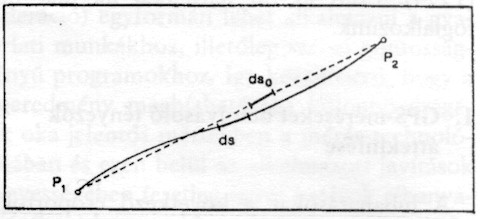
A Fermat-elv alapján (3. ábra) a tér P1 és P2 pontja között az elektromos jel a légkörben nem egyenes vonalban terjed (szaggatott vonal), hanem úgy, hogy az s
utat a lehető legrövidebb idő alatt tehesse meg (folyamatos vonal). Az egyenes vonaltól való eltérés mértéke pedig a levegő fizikai állapotától (végső fokon annak törésmutatójától) függ. Így jön létre a késleltetés, amely hosszabb futási időt és (ebből eredően) a ténylegesnél nagyobb távolságot eredményez.A késleltetést rendesen a modellezett törésmutató (n) integrálásával lehet számítani. A törésmutató ismert összefüggése:
![]()
ahol: e: páranyomás (hPa), T
: abszolút hőfok (K) és P: légnyomás (hPa) (a száraz és nedves levegő együttes, közvetlen mérhető nyomása).(Az összefüggésben szereplő állandókat
Thayer G.D. adta meg (1974); a mikrohullámú tartományra.)A fenti összefüggés jobboldalán látható első tag a száraz légoszlopra, a második tag pedig a nedves légoszlopra vonatkozik:
![]()
![]() .
.
A fent megadott összefüggések felhasználásáva
l a troposzférikus késleltetés hatását (száraz-, illetve nedves levegőre) a következőképpen lehet számítani:![]()
![]() .
.
A jelenséget, pontosabban a légkör fizikai jel
lemzőit többen modellezték; Thayer G.A. (1967), Chao C. C. (1972), Kanamitshu és társai (1983), Davis J. L. és társai (1985), Saastamoinen (1973), Ichikawa és társai (1994), Hirter A. (1998). Ezek földi, illetőleg szondamérések adatait használják, továbbá radiometriai megfigyelésekét.A vizsgálatok a troposzférikus késleltetés egyre újabb sajátosságait tárták fel.
Ilyenek:
– a száraz-, illetőleg nedves légoszlop eltérő viselkedése,
– a késleltetés határozott függése a magassági szögtől,
– a késleltetés azimutfüggése és
– a késleltetés napszak-függése.
Csupán tájékoztatásul említjük, hogy svájci vizsgálatok a száraz légoszlop késleltetésére 1,5–2,5 m-t, a nedves levegő késleltetésére p
edig 0,3 m körüli értéket kaptak.A felsorolt vizsgálatok közül figyelmet érdemel Hirter 4D modellje, továbbá Saastamoinen továbbfejlesztett modellje; ez utóbbinál már földi meteorológiai adatokat is felhasználnak.
A továbbiakban Hirter, H. (1998) alapján be
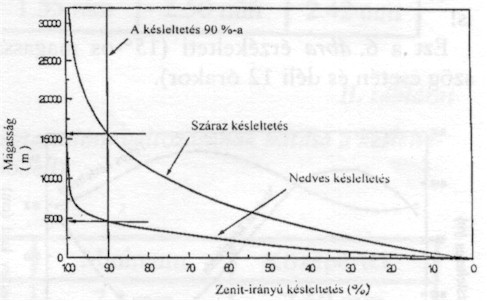
mutatjuk a troposzférikus késleltetés főbb jellemzőit.A 4. ábra a zenitirányú késleltetést mutatja (száraz- és nedves légoszlop esetére) a magasság függvényében.
|
4. ábra. A száraz és nedves levegő (zenit-irányú) késleltetése a magasság függvényében |
Az ábra szerint:
– Késleltetésszáraz > késleltetésnedves.
– A késleltetés 90%-a az alsó légrétegben megy végbe (nedves le
vegőnél 5 km, száraznál pedig 15 km alatt).– A teljes száraz késleltetés csak legalább 100 km magasságnál következik be.
Sajátos a légköri késleltetés és a magassági szög kapcsolata, amit az 5. ábra mutat 0° , illetve 180° azimut mellett.
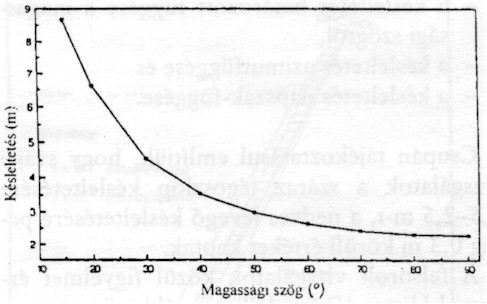 |
5. ábra. A teljes késleltetés a magassági szög függvényében |
Eszerint:
– kis magassági szögnél jelentős a késlelt
etés (15° -nál 8,5–9 m)– zenit irányban a késleltetés < 2,5 m.
Az utóbbi évek vizsgálatai azt is kimutatták, hogy a késleltetés függ a mért oldal azimutjától is!
Ezt a 6. ábra érzékelteti (15° -os magassági szög esetén és déli 12 órakor).
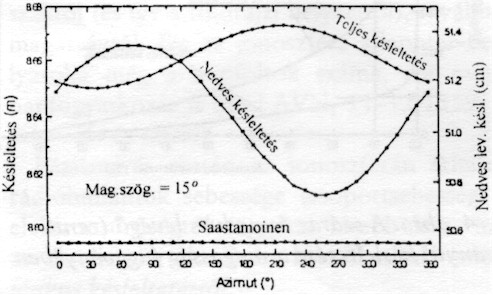 |
6. ábra. A troposzférikus késleltetés azimut-függése; (mag. szög = 15° mellett) |
Az ábrán az abszcissza-tengelyen az azimut-értékek, az ordináta-tengelyen (baloldalt) pedig a késleltetés mértéke látható m-egységben, amely 8,60 és 8,68 m között váltakozik. Ugyanez a jobboldalon cm-egységben mutatja a nedves késleltetést. A 6. ábrán látható három görbe kö
zül a felső kettő Hirter 4D modellje alapján született, az alsó pedig Saastamoinen korábbi (standard) modellje alapján.A levonható tanulságok a következők:
– A késleltetés függ az azimuttól,
– A teljes-, illetőleg nedves késleltetés azimut-függése eltérő,
– A teljes késleltetés maximuma 210–215° -nál adódik, és értéke 8,67 m, a nedves késleltetés maximuma 60° -nál mutatkozik 51,2 cm-rel.
– A késleltetés intervallumai:
– a teljes késleltetésnél 2,3 cm,
– a nedves késleltetésé pedig mintegy 6 mm.
A 7. ábra
három különböző modell felhasználásával mutatja be a késleltetések helyi idő szerinti alakulását. (A baloldalon lévő ordináta-tengelyen az egyes számok 2,230 m-től 2,286 m-ig terjednek).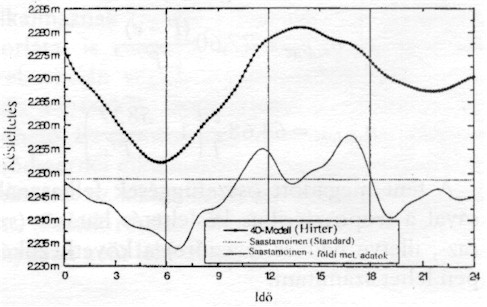 |
7. ábra. A késleltetés napszak-függése (Hirter 4D modellje, Saastamoinen két modellje) |
Az ábra szerint a késleltetés minimuma (Hirter
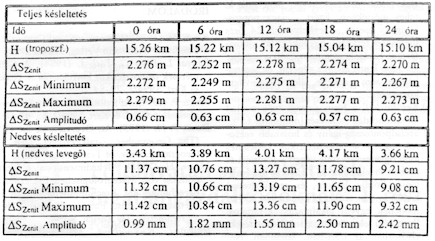
4D) napkelte körül, illetőleg kissé napnyugta után alakul ki, a maximum pedig 12–17 óra között. Ugyanez Saastamoinen újabb modellje alapján hasonló képet mutat, de a késleltetés mértéke kisebb, mint Hirternél, a déli-délutáni időben pedig két maximum adódik.Az I. táblázatban közölt zenitirányú késleltetési adatok érzékeltetik mind a teljes késleltetés, mind pedig a nedves késleltetés napi alakulását (ugyancsak Hirter 4D modellje mérési függvényének felhasználásával) 1989 április 26-ra vonatkozóan.
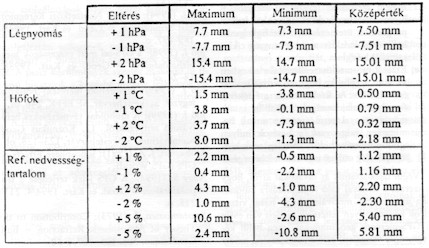
A II. táblázat azt mutatja be, hogy a légkör fi
zikai jellemzőinek adott változására miképpen módosul a zenitirányú késleltetés.I. táblázat |
A teljes és a nedves késleltetés napszakonkénti összevetése (Hirter-modell) |
|
II. táblázat |
A légnyomás, a hőmérséklet, illetőle g a relatív nedvességtartalom változásának hatása a késleltetésre (Hirter 4D modell) |
|
Összefoglalva a következőket állapíthatjuk meg:
a) Az ionoszférikus késleltetés hatása a kétfrekvenciás mérések révén nem esik ki teljes mértékben. Ezért – nagy pontosságigény esetén – leghelyesebb 24 órás méréseket tervezni. Egyébként (az ionoszférikus hatások szempontjából) a méréseket jobb lenne éjszaka végezni, de semmiképpen sem napkelte, illetve napnyugta környékén.
b) Kerülni kell a kismagassági szög mellett látható holdak észlelését (minimum 15° ).
c) Szélsőpontosság-igény és hosszabb vekt
orok esetén a troposzférikus késleltetés jobb figyelembevétele végett – földrajzi és időbeli értelemben is – sűrűbb meteorológiai (földi-, ballon-, és radiométeres) adatokra van szükség, és emellett a 4D-modellek egyedi alkalmazása kívánatos. Ilyen célú jelentős kutatások (fejlesztések) elsősorban az USA-ban, Japánban, Németországban és Svájcban folynak. A II. táblázat adatai arról tájékoztatnak, hogy a meteorológiai adatokat milyen megbízhatósággal kell (kellene) ismerni adott megbízhatósági igény esetén.d) A légkör késleltetésben nemcsak napi, hanem szezonális (évszakos) ciklusok is kimutathatók. Ezekkel számolni kell a programok ütemezésénél. De figyelembe kell venni az aktív naptevékenység ciklusait is (11 év).
e) Ezzel a mostani összeállítással elsősorban az volt a célunk, hogy tájékoztassuk az é
rdeklődőket a késleltetések mértékéről és egyes tulajdonságairól. Külön tanulmányt igényel természetesen annak bemutatása, hogy ezek a hatások milyen módon mérsékelhetők, illetőleg azok kiejtése jelenleg milyen mértékben lehetséges.Végül tájékoztatjuk az olvasókat arról, hogy a szerzőt a témával való foglalkozásra külön
ösen az a kérdés motiválta, hogy hazai viszonyok között milyen feltételek mellett van esély a GPS-mérések geodinamikai (ezen belül kéregmozgás-vizsgálati) célú alkalmazására, amely összefügg a szerző ilyen tárgyú OTKA megbízásával.IRODALOM
Bauer, M. (1994): Vermessung und Ortung mit Satelliten. Wichmann Verlag, 1994.S 273.
Bányai L.–Papp G.–Tóth I. (1994): A GPS-mérések troposzférikus korrelációja = Geod. és Kart. 1994/2, 79–84. o.
Bencze P. (1994): Az ionoszféra hatása a GPS-méréseknél = Geod. és Kart. 1994/2. 85–90. o.
Dana, P. H. (1995): An Overview of the GPS (The Geographer. Craft Project, Dep. of Geography, Univ. of Texas, Ausd. USA)
Hirter, H. (1998): Mehrdimensionalen Interpolition von Meteorologischen Feldern zur Berechnung der Brechungsbedingungen in der Geodäsie. Inst. Für Geodäsie und Photogrammetrie, TU Zürich, S 196
Ichikawa, R.–Kasahara, M.–Mannoji, N.– Naito, I. (1994): An Evaluation of Positioning Error for Space Geodetic Technique Due to Azimuthal Asymmetry of Wet Troposphere Delay Based on JMA 10 km Spectred Model Data. Proceedings of CRCM'93 Symposium, Kobe, Dec. 6–11. 1993; pp 181–187.
Joó I. (1994): A VIII. Nemzetközi Kéregmozgási Szimpózium = Geod. és Kart. 1994/4. 189-197. o.
Joó I. (1998): a GPS-sel mért magasságok megbízhatóságáról = Geod. és Kart. 1998/2, 18–24. ol.
Joó I.
(1999): Felsőrendű mérések; Főiskolai jegyzet. Székesfehérvár, SE FFFK, 246. ol.Joó I.
(1999): A műholdas távméréseket befolyásoló tényezőkről. 12. Kozmikus Geod. Szeminárium, Székesfehérvár, 123–128. ol.Klobuchar, J. A. (1991): Ionosphere Effects on GPS (GPS World).
Nagy S. (1994): A GPS jelek terjedése a troposzférában = Geod. és Kart. 1994/4, 215–218. o.
Saastamoinen, J. (1973): Contribution to the Theory of Atmospheric Refraction = Bull. Geodésique, Nrs. 105–107, p 50
Thayer, G.D. (1989): An Improved Equation for the Radio Refractive Index of Air. Schweizerische Meteorologische Anstalt
Torge, W. (1991): Geodesy. Walter de Gruyter, 1991, p 264
The Effect of the Terrestrial Atmosphere on the Satellite-Assisted Distance Measurements
Dr.I. Joó
Summary
The A. is studying on what terms can be the GPS-measurements used for geodynamic purposes. For programmes of top accuracy all possible sources of error need to be detected and eliminated or the effect needs to be taken into account.
First the paper gives an overview about the main effects (air pressure, temperature, humidity, content of electrons causes the most concerns), then deals practicularly with the ionosphere and troposphere effects. Finally suggestions were made for the conditions to be ensured in the process of GPS-measurements of extreme precision to eliminate or reduce the ionosphere and troposphere effects.