|
Kenyeres Ambrus |
|
|
Kenyeres Ambrus |
|
Bevezetés
A GPS-technika alkalmazása a szintezési hálózatokban a vonatkozó kutató-fejlesztő munka nagy kihívásai közé tartozik. Habár a GPS az első, a gyakorlati geodéziai céloknak is megfelelő háromdimenziós helymeghatározó technika, a magasságmeghatározásban történő alkalmazhatóságát több tényező is gátolja.
• Troposzféra: A GPS-szel meghatározható magasságkomponens pontossága kisebb a vízszintes komponensénél, elsősorban a légköri vízgőztartalom nehezebb modellezhetősége miatt. A mérési időtartam optimális megválasztásával 10 km-nél rövidebb vektorok esetében 2–5 mm pontosságú ellipszoid feletti magasságok határozhatók meg, de 100 km feletti bázisvonalakon is elérhető a cm-es pontosság.
• Geoid: az ellipszoid feletti magasságból a geoid ismeretében határozható meg szintezett jellegű tengerszint feletti magasság. A tisztán gravimetriai adatokból meghatározandó geoidmegoldások pontossága általában még nem elegendő, továbbfejlesztésük (pl. a GPS- és gravimetriai mérések kombinációjával) indokolt.
• Emberi tényezők: a GPS alkalmazásával szemben tapasztalható némi félreértéseken alapuló ellenérzés, pedig a GPS nem törekszik, és nem is törekedhet a szintezés kiszorítására, hiszen a cm alatti pontosságú GPS-magasságmeghatározás gyakorlati alkalmazhatósága feltételezi és igényli a magasabb rendű szintezési hálózatok meglétét. Ráadásul pontossága alulmarad az I. és II. rendű szintezésének, bár már 100 km feletti távolságokon a két technika pontossága összevethető (Torge, 1994). Ugyanakkor tekintetbe véve az alacsonyabb pontossági igényű feladatokat (pl. III. rendű sűrítés) a GPS alkalmazására ma már reális esély van.
A GPS-technikának a szintezési hálózatokban történő alkalmazhatóságát már korábban, nemzetközi szinten több tanulmányban tárgyalták (pl. Röhrich, 1997; Ollikainen, 1997). Véleményünk szerint a szerzők a mérési és feldolgozási stratégia nem adekvát megválasztása miatt arra a következtetésekre jutottak, hogy a GPS-technikával csak 2-3 cm-es pontosság felett lehet magasságmeghatározást végezni, bár Ollikainen már javasolja a GPS alkalmazását a II. rendűnek megfelelő szintezéseknél. A téma hazai aktualitását jelezte dr. Joó István cikkismertetése (Joó, 1998), amelyben a Röhrich- cikkre alapozva fogalmazta meg a GPS-magasságmeghatározásra vonatkozó véleményét. E cikk kisebb szakmai vitát kavart, véleményünket az olvasó a (Borza, Kenyeres, 1998) cikkben találhatja meg.
A tudományos célú GPS-mérések feldolgozása során nyert közel egy évtizedes tapasztalatainkra és a GPS-magasságmeghatározást támogató, általunk kidolgozott és bevezetett GPS-gravimetriai geoidra (Kenyeres, 1992) alapozva 1998-ban elindítottunk egy projektet, amely sikerrel tűzte ki célul annak bizonyítását, hogy a GPS-technikával lehetséges termelésszerűen 1 cm alatti pontossággal magasságmeghatározást végezni, továbbá egy olyan GPS-technológia kidolgozását, amelyet a jövőben a szintezési hálózat III. rendű sűrítési munkálataihoz ajánljuk felhasználni.
A téma aktualitását és jelentőségét kiemeli az EOMA-nak a szakmai közönség által is ismert helyzete. A Dunántúlon az EOMA befejezését a GPS-technológia bevetése a II. rendű sűrítéseknél gyorsítaná, és számottevő költségmegtakarítást is lehetővé tenne. A GPS alkalmazása tehát nem a szintezés kiszorítását célozza, hanem reményeink szerint gazdaságosságával támogatni fogja az EOMA-program gyorsítását.
Cikkünkben a GPS-magasságmeghatározási tesztkampány fontosabb eredményeit és ennek kapcsán a kidolgozott mérési, feldolgozási technológia lényegesebb elemeit mutatjuk be, terjedelmi korlátok miatt csak összefoglaló jelleggel. A részletek iránt érdeklődő olvasó a munka átfogó leírását a (Kenyeres, A.–Borza T. 1998) összefoglaló jelentésben találja meg, amelyet a témában érintett intézményeknek megküldtünk.
GPS-tesztmérések
|
A GPS-sel végzett nagypontosságú magasságmeghatározás témája már régóta foglalkoztatott bennünket, de a konkrét terepi munkákra csak az OGPSH munkálatainak lezárása után kerülhetett sor. 1998 szeptemberében egy háromnapos GPS-mérési kampány keretében Monor-Gödöllő-Aszód-Jászberény térségében a Gödöllői dombság déli nyúlványánál a 10-es poligon G jelű munkaterületén 34 kiválasztott szintezési pontos végeztünk méréseket. A munkaterület kiválasztásánál fő szempont a megfelelő tagoltságú terepek, valamint a lehető legfrissebb és legmegbízhatóbb szintezésű vonalak kijelölése volt. A kiválasztott pontok a munkaterületet kb. 5 km-es átlagos ponttávolsággal, egyenletesen fedik le, közülük 26 pont III. rendű, 8 pont I-II. rendű szintezési pont. Az utóbbiak ún. illesztőpontok is, amelyeket a GPS-gravimetriai geoid meghatározásához használunk fel. A kiválasztott pontok – mint a meglévő szintezési pontok általában – nem voltak alkalmasak a GPS-antennákkal való központos felállásra, ezért a méréseket egy 50 m-en belüli külponton végeztük, és a magassági külpontosságot szintezéssel határoztuk meg. Nyolc Trimble SST és SSE vevővel felszerelt mérőcsapat hatórás mérési periódusokkal napi 12 pontot mért meg, az illesztőpontokon 2 periódust észleltünk. |
A mérések feldolgozása
A GPS-mérések feldolgozását a Bernese 4.0 tudományos igényű és a GPSurvey 2.1 ipari szoftverre is elvégeztük, elemezni kívántuk ugyanis a GPSurvey program alkalmasságát a magasságkomponens cm alatti pontosságú meghatározására. A Bernese-feldolgozásba bevontuk Penc permanens állomás méréseit is, így kapott valamennyi pont egységes EUREF89 rendszerbeli térbeli koordinátát. A feldolgozás folyamán a szélső pontossági követelmények-nek megfelelő általánosan elfogadott stratégiát követtük. A Bernese- és GPSurvey-megoldásokat egy hétparaméteres térbeli Helmert-transzformációval hasonlítottuk össze. A maradék ellentmondások átlagos eltérése a magasságkomponensre 3 mm volt, amely jó egyezésnek tekinthető.
A GPS-gravimetriai geoid előállítása
A GPS-magasságmeghatározás kulcseleme a geoid részletes, nagypontosságú ismerete, hiszen a GPS-technikával meghatározott ellipszoid feletti magasságból (h) a geoidunduláció (N) segítségével számítható a szintezett jellegű geoid feletti magasság (H):
H = h – N
Az eltérő vonatkozási rendszerek és a geoidmegoldások napjainkig még nem kielégítő pontossága miatt a klasszikus eljárásokkal (pl. FFT) előállított gravimetriai geoidmegoldásokat a GPS és a szintezés vonatkozási rendszerével összhangba kell hozni. Az általánosan alkalmazott utólagos felületillesztés (pl. Denker, 1998) mellett az általunk javasolt megoldás a GPS-gravimetriai geoid Kenyeres, 1992; Kenyeres–Seeman, 1999), amely nem utólagosan, hanem a geoidmeghatározási folyamat szerves részeként végzi el a gravimetriai geoid, valamint a GPS és a szintezési hálózat vonatkozási rendszerei közötti ellentmondások feloldását ismert szintezett magasságú GPS-(illesztő)pontok felhasználásával. E technika a beépített szűrési-kiegyenlítési eljárás miatt jobb megbízhatóságú, a GPS-mérésekkel is összhangban levő megoldást szolgáltat. A gravimetriai geoidmegoldást az ELGI kibővített gravimetriai adatbázisának felhasználásával a saját fejlesztésű DIEGO, numerikus integrálást végző szoftverrel állítottuk elő. A munkaterületen a ritkábban felmért részeken sűrítő gravimetriai méréseket végeztettünk az ELGI munkatársaival. Az új gravimetriai pontok magasságát már GPS-mérésekkel határoztuk meg. Ehhez egy egyszerűsített technológiát használtunk (Kenyeres, 1998), mert a pontossági követelmények alacsonyabbak voltak.
A gravimetriai geoidból a munkaterületre vonatkozó GPS-gravimetriai geoid megoldást a kiválasztott nyolc illesztőpont segítségével határoztuk meg, ezen, és csak ezen pontok magasságát ismertnek tételezve fel.
A GPS-magasságmeghatározás eredményei
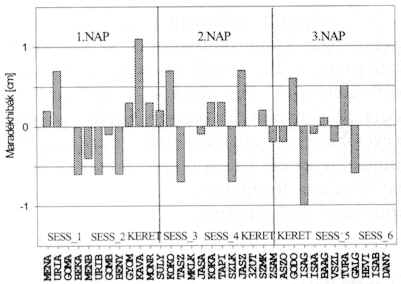
Az illesztőpontokon kívüli pontok magasságát természetesen ismeretlennek tekintettük és magasságukat a GPS-mérésekből számított ellipszoid feletti magasság és a GPS-gravimetriai geoid különbségeként határoztuk meg. Ezeken az újonnan meghatározott magasságokat vetettük össze ezután a szintezési adatokkal. Az eltérések a 2. ábrán találhatók. Véleményünk szerint tekintetbe véve valamennyi korlátozó tényezőt az összhang nagyon jónak tekinthető. Számszerűen megállapítható, hogy a két adatrendszer közötti átlagos eltérés kb. 5 mm, amely úgy is értelmezhető, hogy a szintezett magasságokat 5 mm-es középhibával sikerült reprodukálnunk! Nem centiméterekről van tehát szó, mint amiről eddig az irodalomban olvashattunk. A kapott eredmények mélyebb értelmezése elég nehéz feladat, hiszen egyik adatrendszer sem tekinthető hibátlannak, és az összevetés folyamán ezeket a hibákat nem is tudjuk egymástól elválasztani.
|
2. ábra. A szintezett és a GPS-magasságmeghatározással előállított magasságok eltérései. |
A szintezett magasságokat terhelik:
• mérési hibák (a III. rendű méréseknél a hibakorlát mm-ben 3![]() , ahol L
a vonal hossza km-ben (pl. 5 km-en a felső hibahatár meghaladja a 6 mm-t),
, ahol L
a vonal hossza km-ben (pl. 5 km-en a felső hibahatár meghaladja a 6 mm-t),
• beillesztési hibák,
• a pontok sajátmozgása a szintezéstől eltelt évek alatt (pl. forgalmas hidakon lévő gombok)
A GPS-magasságmeghatározás hibái:
• az ellipszoid feletti magasságok meghatározásának hibái: esetünkben a GPSurvey programmal meghatározott vektorok kiegyenlítéséből
• a geoidundulációk hibája
A közvetlen kvantitatív összevetést megnehezíti, hogy míg a szintezés vonalak mentén történik, hibái a szintezési vonal hosszának függvénye, addig a GPS-technológia területi lefedést ad, ahol a hiba egy II. rendű szintezési poligon nagyságú terület esetén lényegében állandó.
|
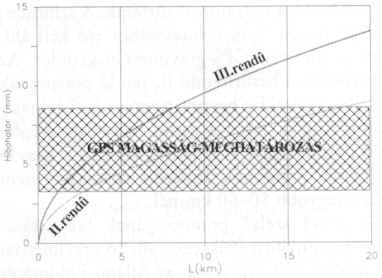
3. ábra. A II. és III. rendű szintezés, valamint a GPS-magasságmeghatározás pontossága. |
A szintezés és a GPS-magasságmeghatározás pontossági viszonyainak elemzését segítheti a 3. ábra, ahol a II. és III. rendű szintezés hibakorlátait a vonalhossz függvényében tüntettük fel, valamint a tesztmérések alapján a GPS-magasságmeghatározás pontosságára adtunk egy általános becslést. Utóbbinál épp a pontosság csekély területi függése miatt egy konstans intervallum jelzi a GPS-magasságmeghatározástól várható pontosságot. Amint az ábráról látható, öt-tíz km között van az a vonalhossz, ahol a két technológia pontossága összemérhető, tíz km felett a GPS már egyértelműen kielégíti a III. rendű pontossági követelményeket (a gyakorlatban a III. rendű vonalak tíz km-nél hosszabbak).
A 2. ábrán néhány pont esetében az eltérés megközelíti az 1 cm-t. ISAG (Isaszeg) esetében pl. a zavaró mérési környezet (forgalmas útkereszteződés) az ok, több pontnál a pontjel elmozdulása feltételezhető. Sajnálatos módon ellenőrző szintezésekre nem volt pénzügyi keretünk.
A GPS-magasságmeghatározási technológia
A bemutatott GPS-mérési tesztkampány és az eredmények kiértékelésének tapasztalatai alapján egy új és részletes magasságmeghatározási technológia került kidolgozásra, amely a kitűzéstől és állandósítástól kezdve a méréseken keresztül a leadandó munkarészekig tartalmazza az egyes, szigorúan betartandó technológiai lépéseket. A technológiai leírás az A.4. utasítás kiegészítéseként készült el, amely ott és akkor lép életbe, ahol és amikor a GPS-technikát alkalmazzák a III. rendű hálózatsűrítésre.
A következőkben a GPS-magasságmeghatározás technológiájának lényeges elemeit ismertetjük. A leglényegesebb különbség az új és a klasszikus technológia között az eltérő műszerezettségből adódóan a hálózat geometriája. Amíg a szintezési hálózatoknál a szintezőműszerek adottságai miatt a pontok utak mentén sűrűn (
» 1 km) helyezkednek el, addig a GPS-hálózat egyenletes területi lefedést nyújt, ahol a pontok átlagos távolsága öt km. Minden település kap így tengerszint feletti magasságot, amit korábban nem mindig sikerült biztosítani.Nincs szükség új típusú pontállandósítás bevezetésére. Településenként legalább egy pontot kell elhelyezni GPS-mérésre alkalmas zavarmentes környezetben (minimális kitakarás, stb.), a pont egy gombbal ellátott lehetőleg mélyalapozású pont, amelyhez két közeli őrpont (csap) tartozik. A kijelölt pontokon hálózati jelleggel 6-12 órás GPS-méréseket kell végezni kétfrekvenciás műszerekkel. Az egységes EUREF89 rendszert valamely OGPSH-keretpont bevonásával kell biztosítani. Terepi ellenőrző feldolgozást a GPSurvey-programmal kell elvégezni (az esetleges pótmérések gyors elvégezhetősége miatt), a végleges feldolgozás a BERNESE-programmal történik. A szintezett jellegű magasságok levezetéséhez elő kell állítani az illesztett GPS-gravimetriai geoidot. Az illesztéshez a besűrítendő II. rendű poligonnak a GPS-mérésekbe bevont pontjait kell felhasználni. Ahhoz, hogy a geoid illesztését megfelelő pontossággal el lehessen végezni a leendő II. rendű poligonok átmérője célszerűen nem lehet nagyobb 50–60 km-nél.
A geoid szélső pontosságának biztosításához, amennyiben szükséges, sűrítő gravimetriai méréseket kell végeztetni az Állami Földmérés és a Magyar Geológiai Szolgálattal együttműködve.
A kidolgozott GPS-magasságmeghatározási technológia kompromisszumok nélkül képes kielégíteni a III. rendű szintezés pontossági követelményeit. Ugyanakkor a GPS-technológia alkalmazása lényegesen gazdaságosabb. Kevesebb pont állandósítására van szükség, minden település kap szintezési pontot, a hálózat mérésére fordítandó idő pedig töredéke a szintezések időigényének.
Összefoglalás
Az OGPSH munkálatainak lezárása után 1998-ban nyílott lehetőségünk a GPS-technikának az EOMA III. rendű szintezési hálózatban való alkalmazhatóságának régóta várt részletes vizsgálatára. Különös aktualitását adta a témának az EOMA-hálózatnak a Dunántúlon immár elodázhatatlan sűrítése. Reményeink szerint a GPS-technika bizonyított alkalmazhatósága további momentumot ad az EOMA-program folytatásának.
A kiválasztott munkaterületen (a Gödöllői-dombság déli nyúlványa) elvégzett, a leendő GPS-magasságmeghatározási technológiát tesztelő méréseinkkel bizonyítani tudtuk, hogy a szintezett magasságot a GPS-technológiával néhány milliméteres középhibával határozhatók meg. A kapott eredmények megfelelnek a III. rendű szintezések pontossági követelményeinek. Tesztméréseinknek nem az irodalomból ismert kísérleti mérések és eredmények reprodukciója volt a célja. Sokéves tapasztalatainkra alapozva (első kísérleti mérésünk 1993-ban volt (lásd pl. Kenyeres, 1996a), új megközelítésekkel (mérési stratégia, geoid előállítása) jól előkészített gyakorlatorientált technológiát teszteltünk sikerrel.
A kidolgozott technológia szerint az elkészült I. és II. rendű poligonok kiválasztott pontjaira alapozva történhet a III. rendű sűrítés, az adott munkaterületet egyenletesen lefedő (átlagos ponttávolság öt km) GPS-magassági pontok kiválasztásával, állandósításával. A GPS-mérések hálózatszerűen történnek, minél több (hét–nyolc db) vevő szimultán alkalmazásával. Az egységes EUREF89 vonatkozási rendszert az OGPSH-keretpontok bevonása biztosítja. A méréseket a BERNESE-programmal kell feldolgozni, a szélső pontosságú gravimetriai geoidot az ismert magasságú pontok alapján kell illeszteni.
Az így létesítendő III. rendű magassági hálózatnak lenne egy igen nagy jelentőségű “mellékterméke” is, egy valóban háromdimenziós hálózat, amely egyszerre lenne képes a vízszintes és magasságmeghatározási igényeket kielégíteni. Az OGPSH a vízszintes hálózati alkalmazások támogatására készült, a felhasznált alappontok és a mérési technológia révén a vízszintes koordinátakomponens középhibája ugyan jobb mint egy cm, de a levezetett magasságok pontossága csak 3–5 cm (Kenyeres – Seeman, 1999).
A technológiafejlesztés eredményeit az MTA Geodéziai Tudományos Bizottsága megtár-gyalta, és javaslata alapján a GPS-magasságmeghatározás már várhatóan a közeljövőben a Dunántúlon folytatódó EOMA III. rendű sűrítési munkálatoknál gyakorlati alkalmazásra kerül.
IRODALOM
Borza T.–Kenyeres A. (1998): Hozzászólás dr. Joó István “A GPS-szel mért magasságok megbízhatóságáról” című cikkéhez = Geod. és Kart. 1998/5. pp. 31–35.
Denker, H. (1998): Evaluation and Improvement of the EGG97 Quasigeoid Model for Europe by GPS and Levelling Data. Proceedings of the 2nd Continental Workshop on the Geoid in Europe, 10–14 March, 1998, Budapest. Publications of the FGI, 98:4, pp. 53–61.
Joó I (1998): A GPS-szel mért magasságok megbízhatóságáról = Geod. és Kart. 1998/2. pp. 18–24.
Kenyeres A. (1992): GPS Gravimetric Geoid Determination Based on Combination of GPS/Levelling and Gravity Data. Proceedings of the 1st Continental Workshop on the Geoid in Europe “Towards a Precise Pan-European Reference Geoid for the Nineties” Prague, 11-14. May, 1992. pp. 482–490.
Kenyeres A. (1996a): Determination and Use of the Geoid In Hungary. Proceedings of the EGS XXI General Assembly Session G7: Techniques for Local Geoid Determination, May 4-8, 1996. The Hague. Reports of the Finnish Geodetic Institute, 96:2, pp. 81–90.
Kenyeres A. (1996b): A Strategy for GPS-Heighting: The Hungarian Solution. Proceedings of the International Symposium on Gravity, Geoid and Marine Geodesy, September 30-October 5, Tokyo, Japan. IAG Symposia, Vo. 117, Eds. J.Segawa, H. Fujimoto, S.Okubo. pp. 651–658. Springer.
Kenyeres A. (1998): Completion of the Nationwide GPS Gravimetric Geoid Solution for Hungary. Paper presented at the EGS XXIII. General Assembly Symposium G11, Nice, France, 20–24 April, 1998 = Physics and Chemistry of the Earth, Vol.24. No.1, pp. 85–90, 1999.
Kenyeres A.–Borza T. (1998): Tesztmérések és technológia kidolgozása az EOMA III. rendű vonalak GPS-technikával történő meghatározásához. FÖMI Kutatási jelentés, készült az FVM FTF megrendelésére, 1998.
Kenyeres A.–Seeman J. (1999): Az OGPSH-pontok tengerszint feletti magasságának meghatározása GPS-technikával = Geod. és Kart. 1999/1. pp. 18–23.
Kenyeres A. (1999): Technology Development for GPS-Heighting in Hungary. Proceedings of the 5th International Seminar on GPS in Central Europe, 5-7 May 1999, Penc, Hungary. Reports on Geodesy No. 5 /46), pp. 89–96.
Ollikainen, M. (1997): Determination of Orthometric Heights Using GPS Levelling. Publications of The Finnish Geodetic Institute, No. 123., p. 143.
Röchrich, St. (1997): Untersuchung von GPS Verfahren hinsichtlich des Einsatzes im Höhennetz (NivP-Netz) = AVN 3/97, pp. 96–105.
Torge, W. (1994): Development, State of the Art and Problems at Large Scale Geoid Determinations = International Geoid Service, Bulletin No. 3., December, 1994. pp. 47–66.
GPS-Heighting Technology Development for 3rd Order Levelling in Hungary
Kenyeres, A.–Borza T.
Summary
Although the GPS technique became the primary tool in surveying, the geodesists are still averse to apply it for height determination referring to its unacceptable accuracy. In Hungary we made a big step forward: a GPS-heighting technology had been elaborated and tested successfully. In GPS test campaign, carried out in a carefully selected portion of the levelling network, we could reproduce the levelled heights with 0.5 cm RMS error! This discrepancy is in a very good agreement with the accuracy requirement of the 3rd order levelling network.
This paper introduces the GPS-heighting test campaign and the basic elements of the new technology offered for the use in the levelling practice.

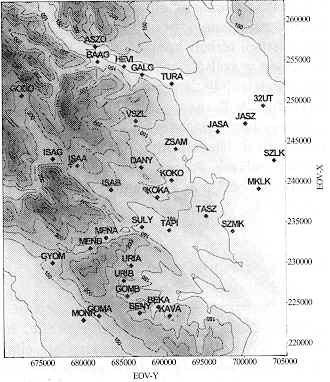 1. ábra: A munkaterületen a mérésekbe bevont szintezett pontok, a
domborzat feltüntetésével.
1. ábra: A munkaterületen a mérésekbe bevont szintezett pontok, a
domborzat feltüntetésével.